Past Projects
Multi-agent Systems and Gaussian Processes
Status: Complete
Started: 2011
Finished: 2013
Related publications and materials:
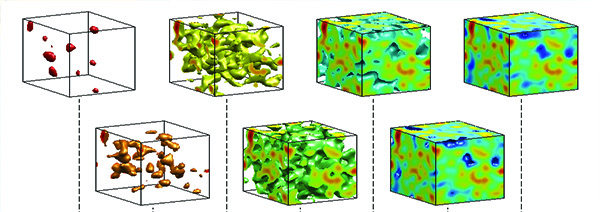
In This project, we have tackled a problem of predicting a spatio-temporal field using successive noisy measurements obtained by robotic sensors, some of which have uncertain localization. A stochastic Gaussian process models is used for environmental fields. The adaptive sampling strategies for the mobile sensor networks is designed to effectively learn the hyperparameters and predict the field using nonparametric regression techniques.
We developed cooperative control algorithms based on control theory for mobile sensor networks to predict the environmental field with minimum error.
Vision-based Mobile Robot's SLAM
Status: Complete
Started: 2012
Finished: 2013
Related publications and materials:
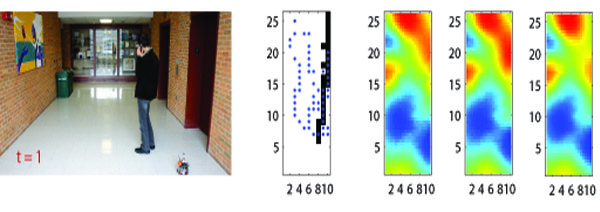
The simultaneous localization and mapping (SLAM) addresses the problem of a robot exploring an unknown environment under localization uncertainty. In this project, we are developing a visual SLAM system optimized for real-time deployment on any mobile robots using a single panoramic camera. The Gaussian Markov Random field (GMRF) is used to predict the vision features, and make a map from the surrounding environments.
Monitoring sea lamprey mating pheromone in the river
Status: Finished
Started: 2010
Finished: 2012
Related publications and materials:

In this work, we collaborated with the fishery department to model the concentration of a synthesized pheromone using a Gaussian process. Female insect pheromone blends induce robust tracking responses in males and direct them into traps. The results show that a single pheromone compound is able to redirect female sea lampreys away from a natural pheromone source and lure them into traps, which should be more effective than targeting males when applied in population control.
Sampling Environment
Status: Complete
Started: 2010
Finished: 2011
Related publications and materials:
- Presented poster for NSF day
- Engineering symposium poster
- Journal paper
- Journal paper (IEEE Control Systems)

In recent years, there has been an increasing exploitation of mobile robotic sensors in environmental monitoring. This project presents a practical solution to a problem of monitoring a possibly unstable environmental process in a large region by a small number of robotic sensors. Optimal sampling strategies are developed, taking into account the quality of the estimated environmental field and the lifetime of the robotic sensors.
Rescue Robots
Status: Finished
Started: 2005
Finished: 2008
Related publications and materials:
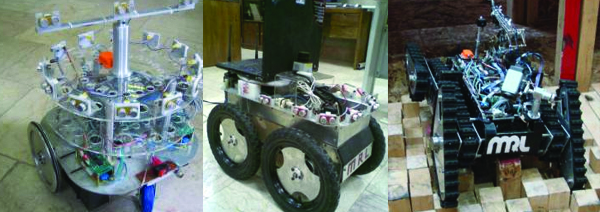
A rescue robot is a robot that has been designed for the purpose of aiding rescue workers. Common situations that employ rescue robots are mining accidents, urban disasters, hostage situations, and explosions. Rescue robots were used in the search for victims and survivors after the September 11 attacks in New York. The benefits of rescue robots to these operations include reduced personnel requirements, reduced fatigue, and access to otherwise unreachable areas. I have been several years in a robotic team. My duty was finding position of robots and obstacles.
Dodecahedron Inertial Navigation Network
Status: Finished
Started: 2006
Finished: 2009
Related publications and materials:
- Power Point presentation
- Micro Controller Code
- MSc. Thesis (in Farsi)
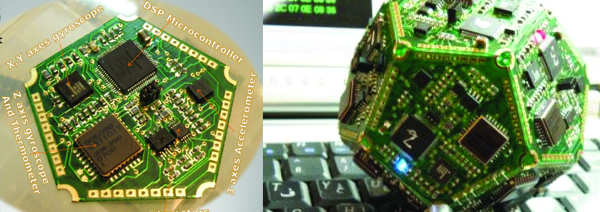
Position estimation has always been a challenge for the mankind, be it navigating spaceships using Inertial Navigation Systems (INSs), or simply crossing the desert using compass or stars to find his direction. Different applications call for different methods, however, the main goal is the same in all navigation: to estimate or measure position or some of its derivatives.
Since an INS refers to no real-world item beyond itself, it is therefore self-contained, immune to jamming and deception, non-radiating, and a good candidate for position estimation. Between 2006 and 2009, I was developing a sensor network to determine the position with measuring inertial data from low-cost low-precision inertial sensors. I had made a small and low-cost Inertial Sensor Network, especially with application in Autonomous Vehicles. I made it completely by myself, from designing steps to soldering and DSP programming.